6 Starting from Continuum Mechanics
Consider a body \(\mathcal{B}\) in three-dimensional Euclidean space \(\mathbb{E}^3\).
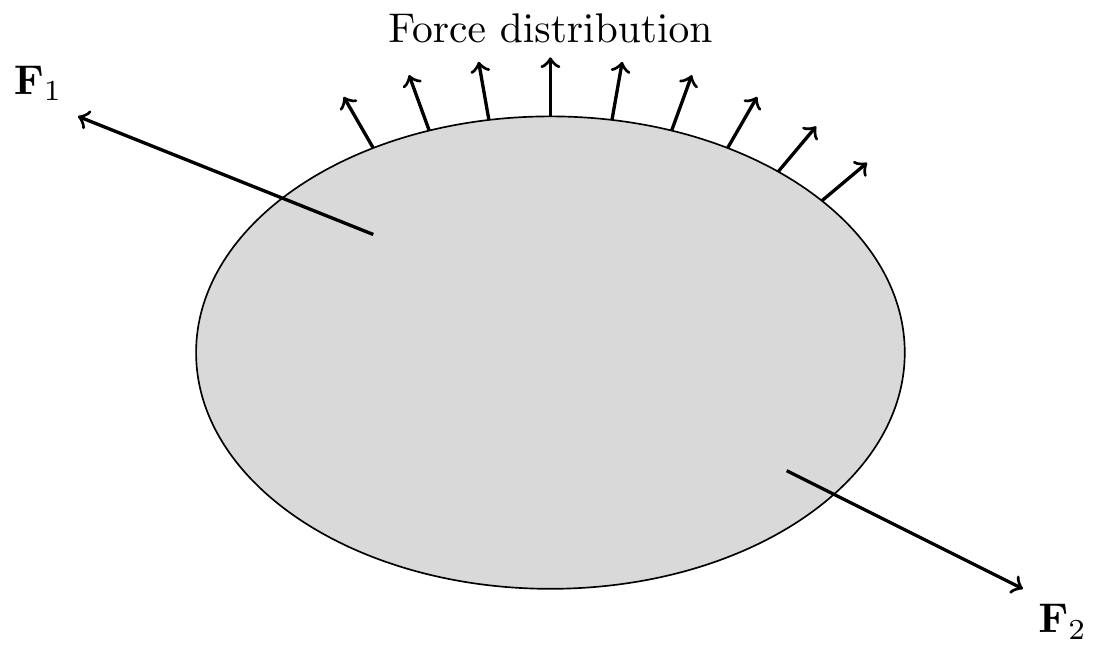
In general, bodies are deformable continua. We depict continua as in the above figure and refer to them as continuum potatoes.
Point or distributed forces or moments can be applied to a body’s surface or throughout its volume. For example, a body resting on a table has contact forces on the surface touching the table, while weight acts on all points in the body.
TipThink!
Question: How do we know if a body has moved?
NoteAnswer
…
Consider a reference configuration for this body. A reference configuration is any configuration that can be physically occupied by the body — it could be the initial configuration, but need not be.
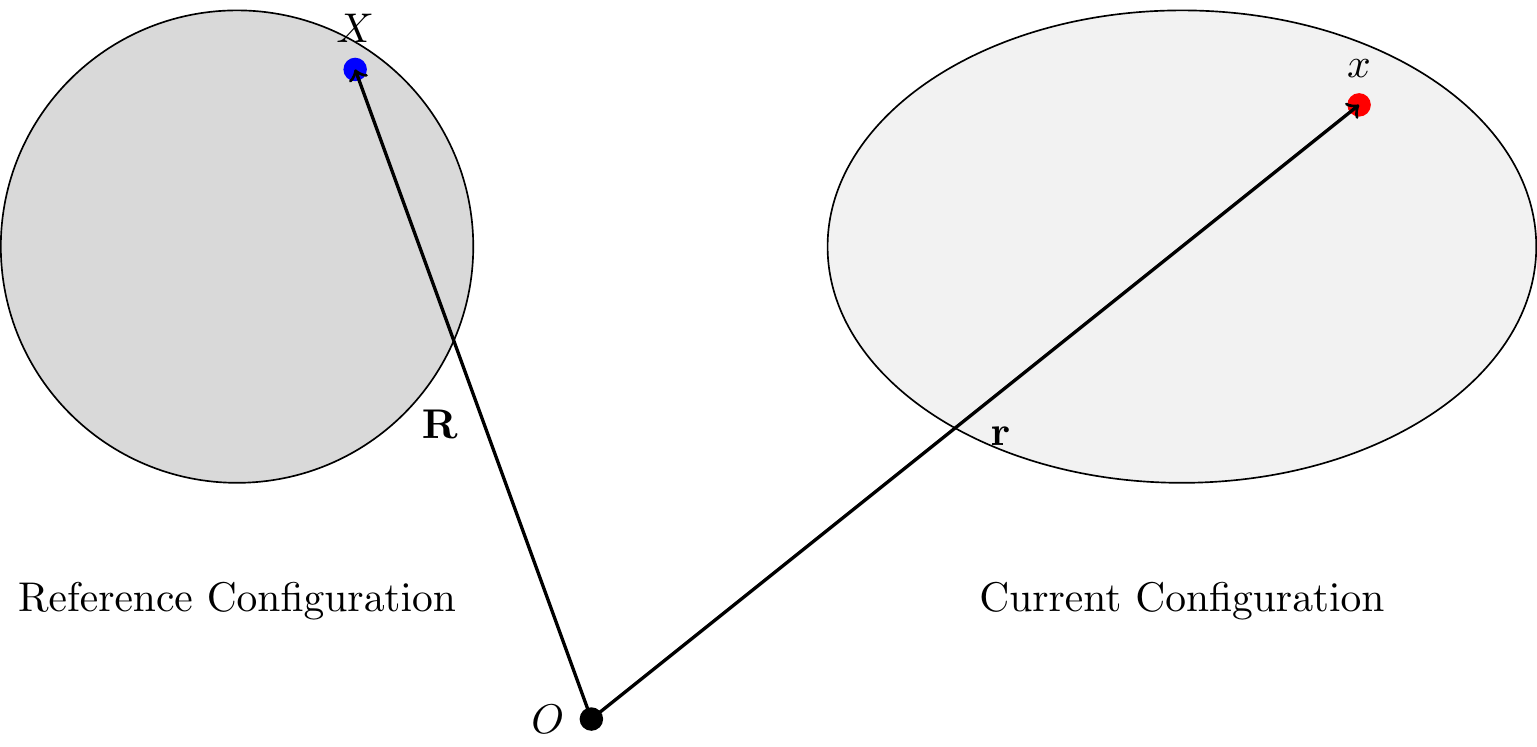
We denote the position vector from a chosen fixed origin to a material point in the reference configuration as \({\bf R}\). The position vector to the same material point in the current configuration is \({\bf r}\).
The motion of the body is described by \[\begin{align} {\bf r} = \bchi({\bf R},t). \end{align}\]
TipThink!
Question: What makes a body rigid?
NoteAnswer
In this class, we consider only rigid bodies. If we choose two points on a rigid body, the distance between them is always constant. Also, angles between material lines on a rigid body are constant.
TipThink!
Question: Under what conditions do we consider a rigid body to be a particle?
NoteAnswer
In the beginning of the class, we consider particles. Particles are idealized rigid bodies whose rotational inertia is ignored.